The down-side to steppers is that they are more complicated to hook up than simple DC motors. Steppers have 4,5,6 or 8 wires coming out of them! Electricity must be fed to just the right wires, in just the right amount and at just the right time for the motor to take a step. Fortunately this is a common need, and there are inexpensive electronic devices (integrated circuits or IC's) that are made just for this task. The job of the stepper motor driver is to convert two bits of information (we will use two of our bit wires again) into the proper pulses of electrical flow that will make the stepper motor work.
And what do these two bits do?
The first is DIRECTION-- this bit determines which direction
(CW or CCW) steps will go.
The second is STEP-- when the driver receives this bit, the
motor takes a step in the direction set by the DIRECTION bit.
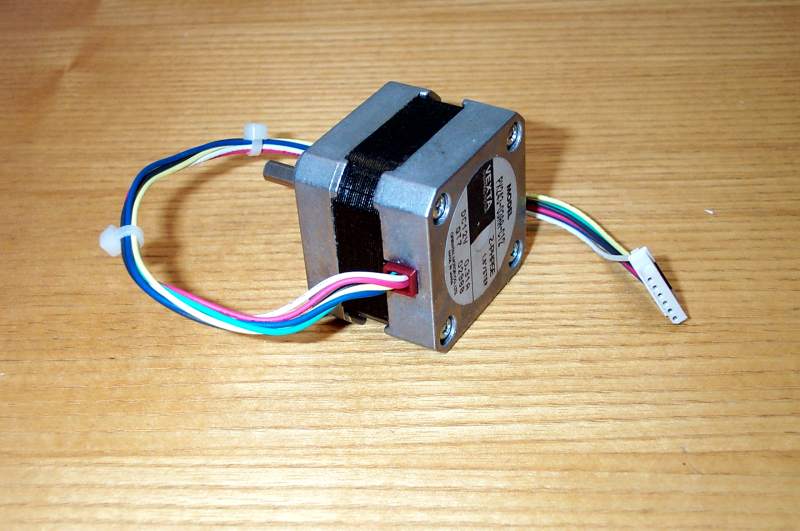
Stepper motors are in lots of commonly used computer equipment-- they move the paper (up and down) and the print head (across) in your printer. They move the read/write head across the surface of your hard and floppy disk drives. Because of this, they are relatively easy to find as junk! Which is good, because when they are brand new they can be very expensive.
Steppers come in a wide range of sizes-- generally the bigger they are, the more turning force (torque) they have. The ones we will be experimenting with are pretty small, and similar to those you might find if you took apart an old floppy drive. They are new, but were cheap because they were surplus. Our stepper motors have 200 steps/revolution (1.8 degrees per step) which is a very common value-- but other motors may have fewer (or sometimes more) steps/rev.
If you want to know more about steppers and how to run them, there is a wealth of information on the Web. I have listed some of my favorite sites in the reference section.
Stepper motor drivers also come in a wide variety of types and sizes.
It is not that hard to build your own drive electronics from commonly
available parts, but for small motors (like ours) it is far easier
(and just as cheap) to use a ready-made IC. We will be using the
UCN5804
chip. It combines my favorite two features: cheap and easy!
OK, enough talk-- let's do it...
{kind=link}